
В современной промышленной автоматике растёт потребность в максимально точном измерении положения. Абсолютные энкодеры широко применяются в роботизированных системах и точных производственных линиях, так как избавляют от необходимости повторной инициализации после включения питания. ECAT-2074A разработан специально для решения этих задач, обеспечивая точную и быструю передачу данных к управляющим устройствам через интерфейс EtherCAT, что особенно важно при реализации задач прецизионного позиционирования.
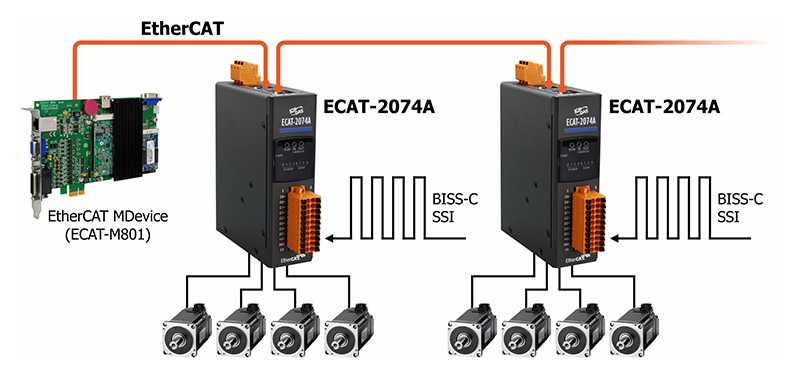
Модуль ECAT-2074A это эффективное решение для работы с абсолютными энкодерами в системах автоматизации, использующих интерфейс EtherCAT. Устройство поддерживает два распространённых протокола — SSI и BiSS-C, с возможностью работы на частотах до 10 МГц. ECAT-2074A оснащён четырьмя независимыми каналами для параллельного подключения энкодеров и способен обрабатывать до 48 бит данных, автоматически компенсируя задержки сигналов, возникающие из-за длины кабелей. Доступны различные частоты передачи данных и два типа кодирования информации: бинарный, и код Грея.
Абсолютный энкодер обычно оснащён функцией сохранения исходных данных о положении после отключения и восстановления питания системы. Однако, если настройки ведущего устройства энкодера были утеряны, пользователю всё равно потребуется повторно задать параметры. В свою очередь, модуль ECAT-2074A имеет встроенную энергонезависимую память, позволяющую сохранять заданные пользователем параметры. Встроенная энергонезависимая память обеспечивает сохранение пользовательских параметров и восстановление настроек после перебоев электропитания.
Особенности работы ECAT-2074A:
-
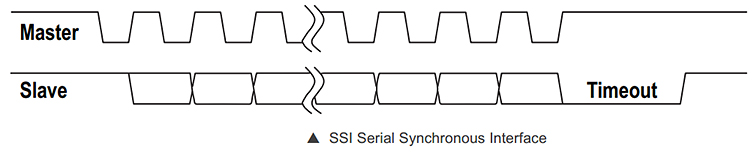
Режим SSI: Мастер периодически отправляет импульсы на энкодер, который передает данные по фронту импульса, а мастер считывает их по спаду сигнала. По завершении передачи мастер удерживает высокий уровень сигнала, а энкодер после таймаута готов к следующей передаче.
-
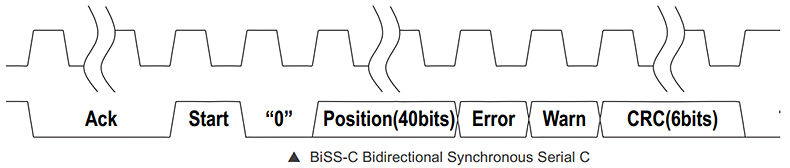
Режим BiSS-C: Мастер отправляет периодический импульс, на второй фронт которого энкодер отвечает подтверждением (Ack), затем передает стартовый бит и информацию о позиции, включая биты ошибок и предупреждений, а также контрольную сумму CRC. Этот код проверки генерируется на основе полинома генерации CRC. Мастер (контроллер) должен знать этот полином, чтобы проверить данные. Общий полином генерации CRC — это x6+x1+x0 (CRC-6). После завершения передачи сигнал возвращается в высокое состояние по таймауту.
Количество бит, передаваемых в режиме BiSS-C, настраивается индивидуально: максимальное количество многооборотных и однооборотных битов в сумме не превышает 48. Возможно использование только однооборотного режима при необходимости.
ECAT-2074A предлагает выбор из семи частот передачи, начиная от 156,25 кГц и заканчивая 10 МГц, что позволяет адаптировать работу модуля под характеристики конкретного энкодера.
| Порядковый номер частоты | Частота |
| 0 | 10 МГц |
| 1 | 5 МГц |
| 2 | 2.5 МГц |
| 3 | 1.25 МГц |
| 4 | 625 кГц |
| 5 | 312.5 кГц |
| 6 | 156.25 кГц |
Модуль также автоматически компенсирует задержки сигналов: сигнал, передаваемый между ведущим устройством и энкодером, задерживается из-за длины кабеля, то есть чем длиннее кабель, тем больше измеряемое значение задержки. На высоких частотах передачи эта задержка может привести к некорректным показаниям данных. ECAT-2074A измеряет задержку, вызванную длиной кабеля, и автоматически устанавливает компенсационное значение для обеспечения правильного считывания данных.
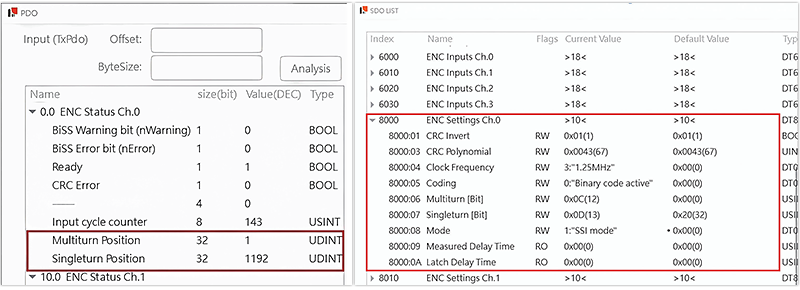
Дополнительно ECAT-2074A поддерживает работу с протоколом CANopen over EtherCAT (CoE), используя объекты SDO для инициализации и настройки, а также объекты PDO для регулярной передачи текущих данных о положении энкодеров.
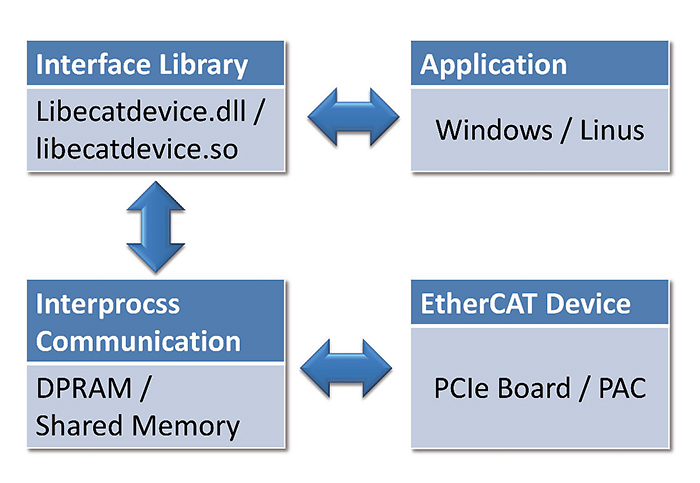
ICP DAS предоставляет библиотеку libecatdevice (.dll), позволяющую использовать устройства серии EtherCAT Master под управлением операционной системы Windows. Библиотека упрощает процесс разработки и предоставляет мощный функционал для быстрого начала работы. Архитектура библиотеки наглядно представлена на следующей диаграмме:
-
Interface Library (Интерфейсная библиотека) - взаимодействует с приложением пользователя на Windows/Linux.
-
Interprocss Communication (Межпроцессное взаимодействие) — обеспечивает связь между интерфейсной библиотекой и устройством EtherCAT (PCIe-карта или PAC).
Модуль можно управлять посредством шины EtherCAT через модульные контроллеры серии EMP-9000, например, EMP-9658-16, без корзины модулей — EMP-2848M или через программный софт на ПК посредством плат с EtherCAT интерфейсом серии ECAT-M800.
Таким образом, благодаря сочетанию высокой скорости работы, универсальности протоколов, возможности параллельного подключения нескольких энкодеров и простоте интеграции, ECAT-2074A является надёжным и эффективным решением для задач точного позиционирования в промышленных системах.







